Introduction
Extracting 3D information from the set of digital images using stereo algorithms
became common in several fields of computer vision. In this work, new method
is presented, which can improve the performance of all area-based stereo algorithms. In some cases, the
processing speed can be increased up to six times. This new method is called false epipolar
constrain, as it is roughly based on the most common epiplar constrain.
Let's expect, that we have a single pair of stereoimages (these are the two views at single
scene from different positions). The most elemental task in area-based stereo algorithm is
to find for single point in first image its corresponding point in second image. As these points
are the projections of the single point in the real scene, we can compute the position of the
original point from their positions.
Finding the corresponding point can be the most difficult, so several constrains has been developed
to simplify this search. The most common is the epipolar constrain, which can narrow the search
from the whole image into the single line (called the epipolar line).
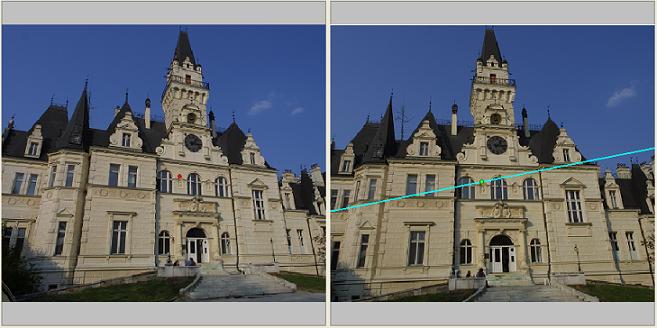
Figure 1.1: Epipolar constrain was used for these stereo pictures
to search for corresponding points. For the red point in the first picture,
the epipolar line is displayed in second picture. Corresponding point is
located on this line.
Using the new false epipolar constrain, a small region with corresponding point in epipolar line
can be pinpointed. This approach will narrow the search form whole line into this small region and
consequently speed up the algorithm. Also the precision and reliability of corresponding point
detection is increased.
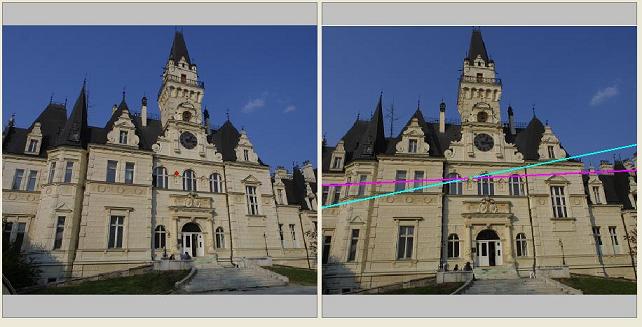
Figure 1.2: Search for corresponding point is augmented using false
epipolar constrain in this picture. Purple false epipolar line is pinpointing
the location of corresponding point by intersection with epipolar line.
Back